Points3D
A 3D point cloud with positions and optional colors, radii, labels, etc.
Components components
Required: Position3D
Optional: Text, ShowLabels, ClassId, KeypointId
Shown in shown-in
- Spatial3DView
- Spatial2DView (if logged above active projection)
- DataframeView
API reference links api-reference-links
Examples examples
Simple 3D points simple-3d-points
"""Log some very simple points."""
import rerun as rr
rr.init("rerun_example_points3d", spawn=True)
rr.log("points", rr.Points3D([[0, 0, 0], [1, 1, 1]]))
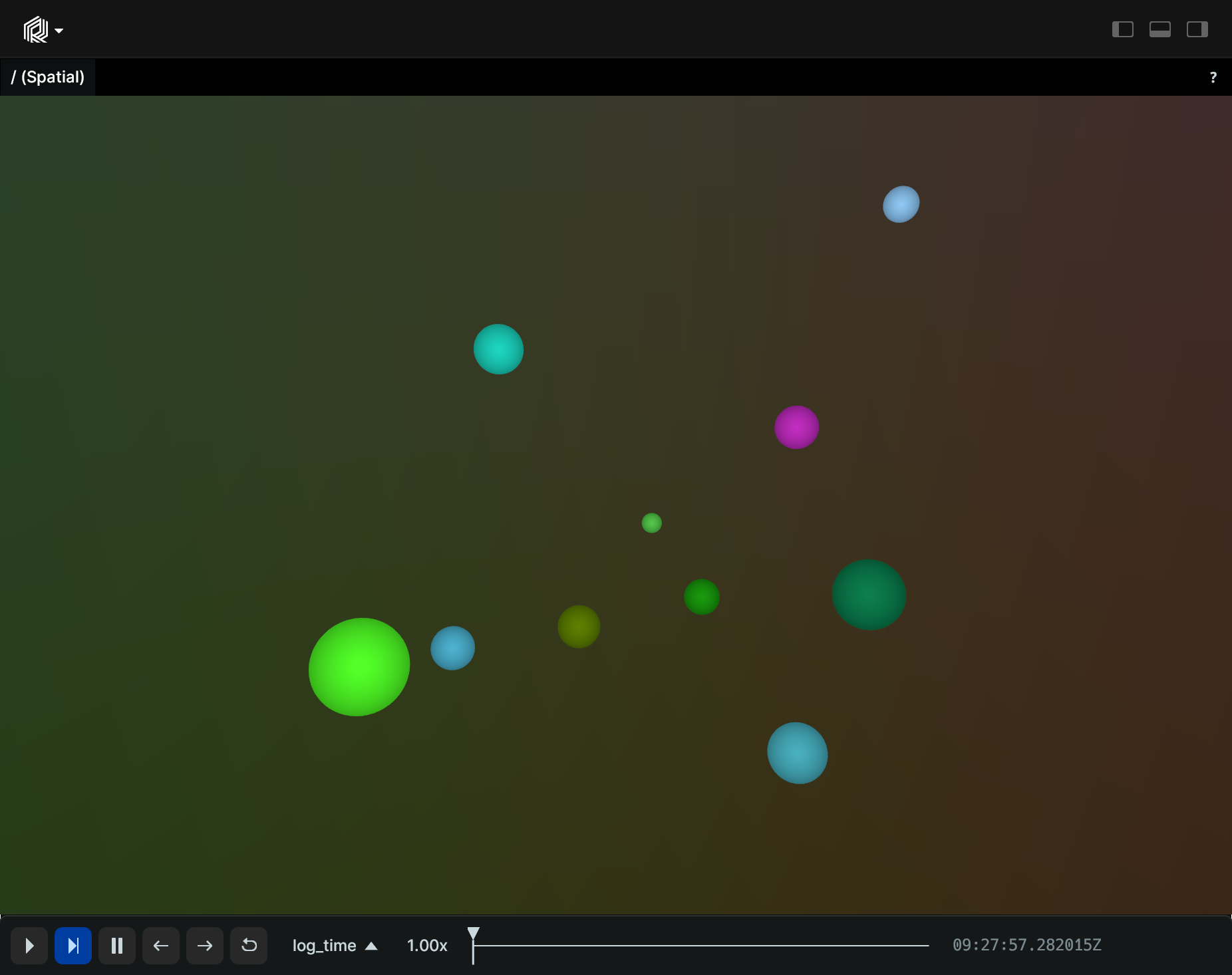
Randomly distributed 3D points with varying color and radius randomly-distributed-3d-points-with-varying-color-and-radius
"""Log some random points with color and radii."""
import rerun as rr
from numpy.random import default_rng
rr.init("rerun_example_points3d_random", spawn=True)
rng = default_rng(12345)
positions = rng.uniform(-5, 5, size=[10, 3])
colors = rng.uniform(0, 255, size=[10, 3])
radii = rng.uniform(0, 1, size=[10])
rr.log("random", rr.Points3D(positions, colors=colors, radii=radii))
Log points with radii given in UI points log-points-with-radii-given-in-ui-points
"""Log some points with ui points & scene unit radii."""
import rerun as rr
rr.init("rerun_example_points3d_ui_radius", spawn=True)
# Two blue points with scene unit radii of 0.1 and 0.3.
rr.log(
"scene_units",
rr.Points3D(
[[0, 1, 0], [1, 1, 1]],
# By default, radii are interpreted as world-space units.
radii=[0.1, 0.3],
colors=[0, 0, 255],
),
)
# Two red points with ui point radii of 40 and 60.
# UI points are independent of zooming in Views, but are sensitive to the application UI scaling.
# For 100% ui scaling, UI points are equal to pixels.
rr.log(
"ui_points",
rr.Points3D(
[[0, 0, 0], [1, 0, 1]],
# rr.Radius.ui_points produces radii that the viewer interprets as given in ui points.
radii=rr.Radius.ui_points([40.0, 60.0]),
colors=[255, 0, 0],
),
)

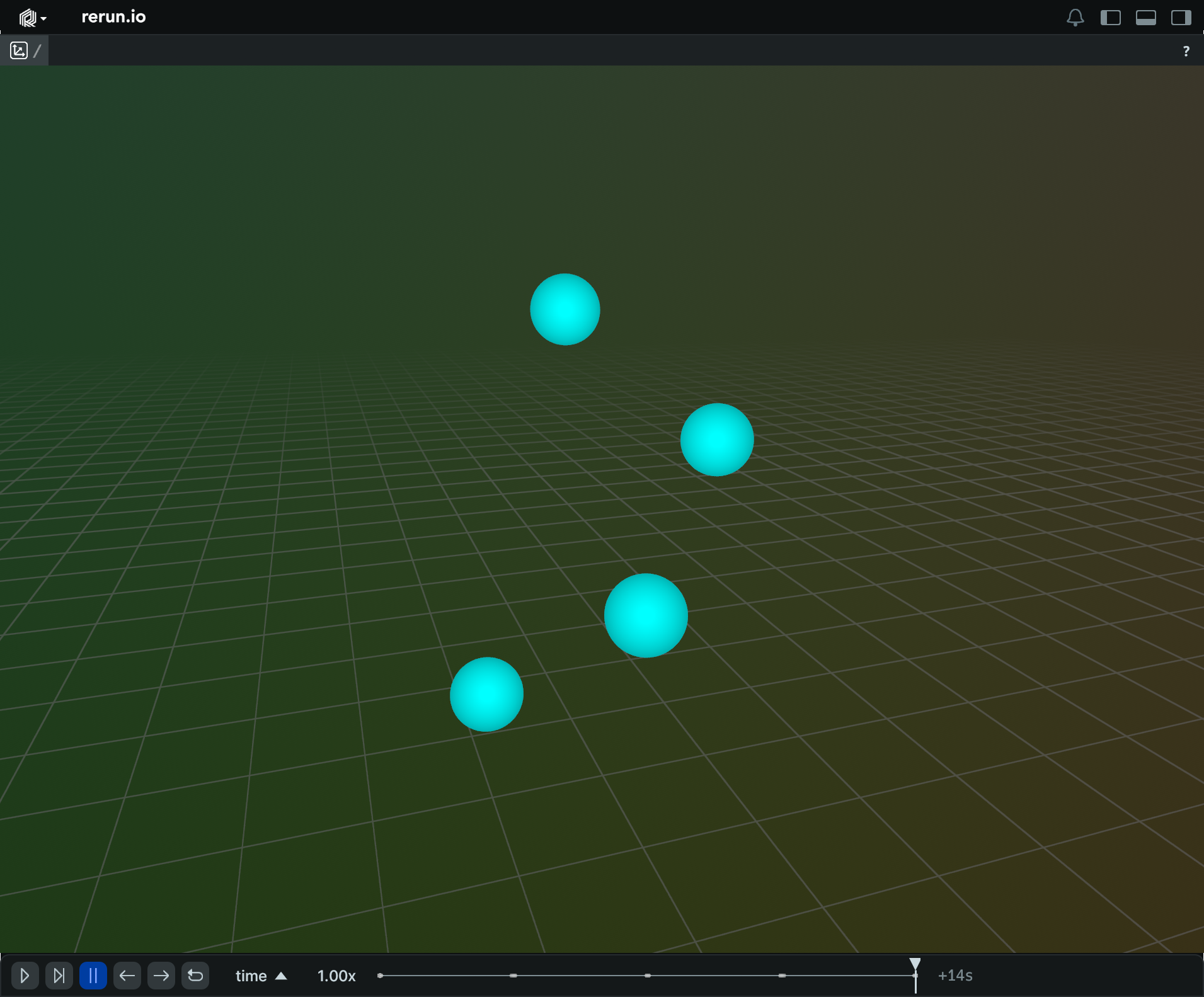
Update a point cloud over time update-a-point-cloud-over-time
"""
Update a point cloud over time.
See also the `points3d_column_updates` example, which achieves the same thing in a single operation.
"""
import numpy as np
import rerun as rr
rr.init("rerun_example_points3d_row_updates", spawn=True)
# Prepare a point cloud that evolves over 5 timesteps, changing the number of points in the process.
times = np.arange(10, 15, 1.0)
# fmt: off
positions = [
[[1.0, 0.0, 1.0], [0.5, 0.5, 2.0]],
[[1.5, -0.5, 1.5], [1.0, 1.0, 2.5], [-0.5, 1.5, 1.0], [-1.5, 0.0, 2.0]],
[[2.0, 0.0, 2.0], [1.5, -1.5, 3.0], [0.0, -2.0, 2.5], [1.0, -1.0, 3.5]],
[[-2.0, 0.0, 2.0], [-1.5, 1.5, 3.0], [-1.0, 1.0, 3.5]],
[[1.0, -1.0, 1.0], [2.0, -2.0, 2.0], [3.0, -1.0, 3.0], [2.0, 0.0, 4.0]],
]
# fmt: on
# At each timestep, all points in the cloud share the same but changing color and radius.
colors = [0xFF0000FF, 0x00FF00FF, 0x0000FFFF, 0xFFFF00FF, 0x00FFFFFF]
radii = [0.05, 0.01, 0.2, 0.1, 0.3]
for i in range(5):
rr.set_time_seconds("time", 10 + i)
rr.log("points", rr.Points3D(positions[i], colors=colors[i], radii=radii[i]))
Update a point cloud over time, in a single operation update-a-point-cloud-over-time-in-a-single-operation
"""
Update a point cloud over time, in a single operation.
This is semantically equivalent to the `points3d_row_updates` example, albeit much faster.
"""
from __future__ import annotations
import numpy as np
import rerun as rr
rr.init("rerun_example_points3d_column_updates", spawn=True)
# Prepare a point cloud that evolves over 5 timesteps, changing the number of points in the process.
times = np.arange(10, 15, 1.0)
# fmt: off
positions = [
[1.0, 0.0, 1.0], [0.5, 0.5, 2.0],
[1.5, -0.5, 1.5], [1.0, 1.0, 2.5], [-0.5, 1.5, 1.0], [-1.5, 0.0, 2.0],
[2.0, 0.0, 2.0], [1.5, -1.5, 3.0], [0.0, -2.0, 2.5], [1.0, -1.0, 3.5],
[-2.0, 0.0, 2.0], [-1.5, 1.5, 3.0], [-1.0, 1.0, 3.5],
[1.0, -1.0, 1.0], [2.0, -2.0, 2.0], [3.0, -1.0, 3.0], [2.0, 0.0, 4.0],
]
# fmt: on
# At each timestep, all points in the cloud share the same but changing color and radius.
colors = [0xFF0000FF, 0x00FF00FF, 0x0000FFFF, 0xFFFF00FF, 0x00FFFFFF]
radii = [0.05, 0.01, 0.2, 0.1, 0.3]
rr.send_columns(
"points",
indexes=[rr.TimeSecondsColumn("time", times)],
columns=[
*rr.Points3D.columns(positions=positions).partition(lengths=[2, 4, 4, 3, 4]),
*rr.Points3D.columns(colors=colors, radii=radii),
],
)
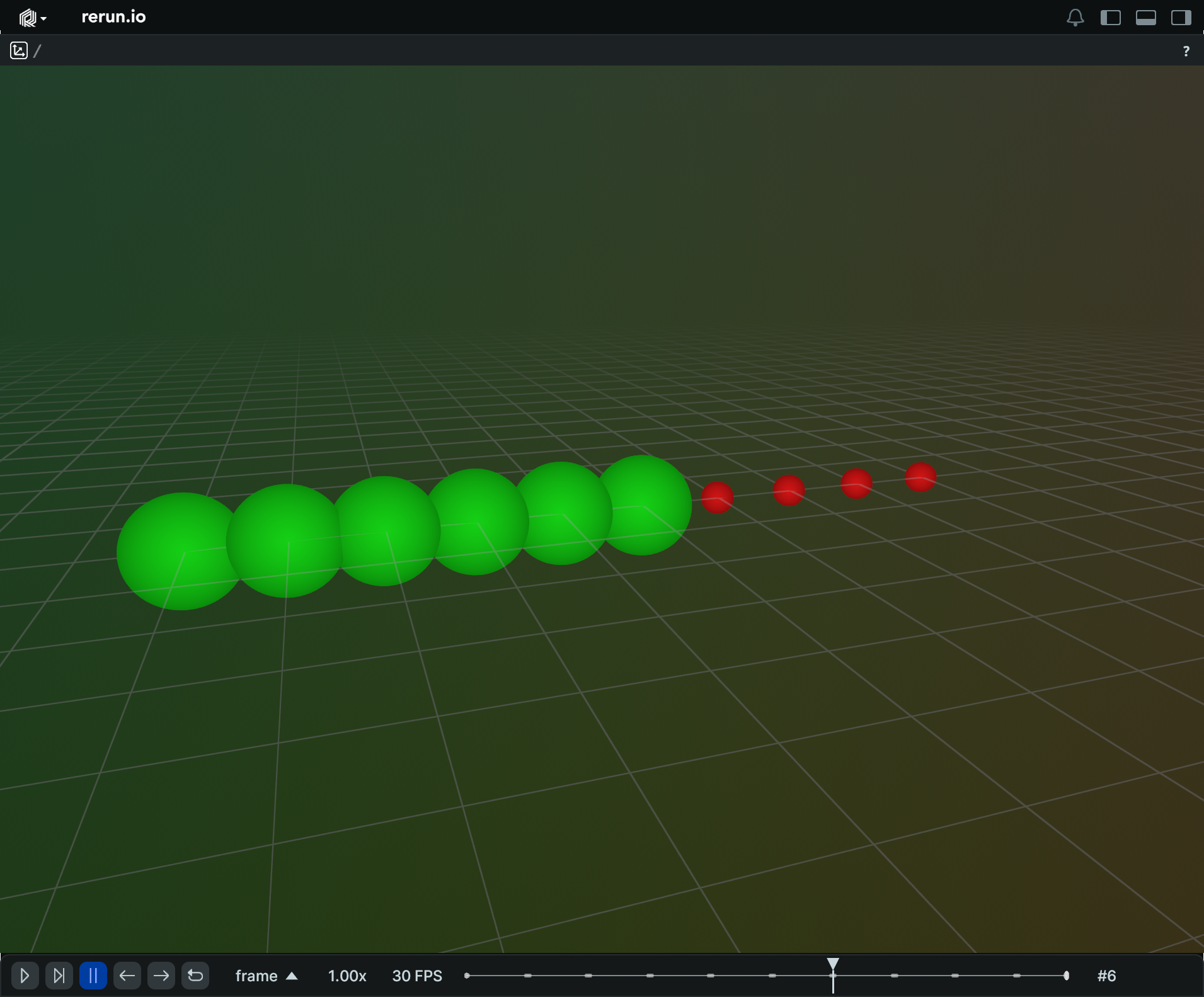
Update specific properties of a point cloud over time update-specific-properties-of-a-point-cloud-over-time
"""Update specific properties of a point cloud over time."""
import rerun as rr
rr.init("rerun_example_points3d_partial_updates", spawn=True)
positions = [[i, 0, 0] for i in range(0, 10)]
rr.set_time_sequence("frame", 0)
rr.log("points", rr.Points3D(positions))
for i in range(0, 10):
colors = [[20, 200, 20] if n < i else [200, 20, 20] for n in range(0, 10)]
radii = [0.6 if n < i else 0.2 for n in range(0, 10)]
# Update only the colors and radii, leaving everything else as-is.
rr.set_time_sequence("frame", i)
rr.log("points", rr.Points3D.from_fields(radii=radii, colors=colors))
# Update the positions and radii, and clear everything else in the process.
rr.set_time_sequence("frame", 20)
rr.log("points", rr.Points3D.from_fields(clear_unset=True, positions=positions, radii=0.3))